
Sürü Teknolojisi
İçindekiler Tablosu
Sürü davranışı (Swarm Behaviour ) Nedir?

Sürü davranışına değinmeden önce sürüyü tanımlamalıyız. Sürü, birlikte yaşayan canlıların meydana getirdiği topluluktur. Böcekler, bal arısı sürüleri, hatta insan topluluklarının birlikte ve organize sergilediği davranışlar sürü davranışına örnek verilebilir. Bu topluluklardaki bireylerin birlikte avlanması , hareket etmesi veya eşleşmesi gibi kolektif davranışlar bu topluluğun üyesi olan bireylerin şansını her bir birey düzeyinde arttır. Bu topluluğun üyeleri artık anlık av ve eşleşme için değil birlikte uzun süreli yaşam için uygun şekilde hareket eder. Bunu, binlerce hayvanın tek bir organizmaya dönüşerek karar verebilen ve hareket edebilen ortak bir beyin oluşturması gibi düşünebiliriz.



Sürü zekası (Swarm Intelligence)
Sürü zekası, böceklerin ve diğer hayvanların sosyal davranışlarından ilham alan ve problem çözmede nispeten yeni bir yaklaşımdır. [1]
Günümüzde, doğada var olan birçok örneğin benimsenip insanlara yarar sağlayacak şekilde uyarlandığı gözlenmektedir. Bunlardan birisi de , sürü zekası olarak dilimize çevrilen swarm intelligence teknolojisidir.
Doğadaki optimizasyon algoritmalarından birkaçı aşağıdaki listede verilmiştir.
- Kurt Koloni Algoritması
- Karınca Koloni Optimizasyonu
- Ateşböceği Algoritması

Teknolojide Sürü Zekası Örnekleri
Sürü zekasının ilk örneğini Craig Reynolds 1986’da yazılım tabanlı yapay yaşam simülasyonunu olarak modelledi. Boid adı verilen kuş benzeri bir nesneye atıfta bulunan ve sürü halinde hareket eden kuşların davranışlarına yönelik bir program modeli tasarladı. Robotikte sürü zekası terimini ilk olarak 1989’da Gerardo Beni ve Jing Wang tanımladı. [4] 1992’de Marco Dorigo karınca kolonisinin algoritmalarından yararlanarak bir karıncanın koloni davranışlarının optimizasyonu için yapay zeka simülasyonu tasarladı. [3] 2005 yılında Derviş Karaboğa arı kolonilerinin davranışlarından yararlanarak yapay arı kolonisi algoritması tasarladı. 2008 yılında ise Xin She Yang ateşböceklerinin yanıp sönme (lüminesans) davranışından etkilenerek ateşböceği algoritmasını geliştirdi.

Çoklu robot sisteminin koordinasyonunu temel alan bu teknoloji bir hedefe ulaşmak için ortak bir amaç çerçevesinde işbirliği içinde çalışır. Sürü zekasının temel özellikleri aşağıda verilmiştir :
- Merkezi olmayan yerel kontrolleri vardır
- Merkezi olmayan yerel iletişimleri vardır
- Öz organizasyon sonucunda küresel bir davranışları ortaya çıkar.
- Otonomlardır
- Çok sayıda robotu üyesi olarak barındırır.
- Acil davranış ve yerel algılama yetenekleri içerir.
- Biyolojik ilham duygusu temelli çalışmalarını yürütürler. [5]
Sürü Robotik Sistemleri
Sürü Robotiği (SR), basit fiziksel özelliklerden oluşan çok sayıda robot sisteminin bir araya gelerek (göreceli olarak) bu robotların nasıl koordine edileceğine gönderme yapan bir yeni bir yaklaşımdır.
Bir görevi tamamlamak için, tek bir robotun, yüksek tasarım, yapım ve bakım maliyetiyle sonuçlanan karmaşık yapı ve kontrol modülleri ile tasarlanması gerekir. Tek bir robotta, meydana gelen hasar, tüm sistemi etkileyebilir ve robot bu durumda savunmasız kalabilir. Robota ne olacağını tahmin etmek zorlaşır. SR, gruplar arası işbirliği yoluyla aynı yeteneği elde edebilir ve basit ögelerin yeniden kullanılabilirliğinden ve düşük imal ve bakım maliyetinden yararlanır. SR özellikle büyük ölçekli görevler için uygundur. [6]
SR, sürü zekası ilkeleri ile yakından ilişkilidir . Bu ilkeler , hataya dayanıklı , ölçeklenebilir ve esnek sistemlerin gerçekleştirilmesini teşvik eder. [7] Ayrıca , kendi kendini organize eden herhangi bir merkeze bağlı olmayan sistemleri barındırır. SR‘de robotların birbiriyle ve çevresiyle etkileşiminden kolektif bir davranışın ortaya çıktığı varsayılır. Bu yaklaşım sonucunda bir sürü davranışı ve yapay sürü zekası meydana gelir.
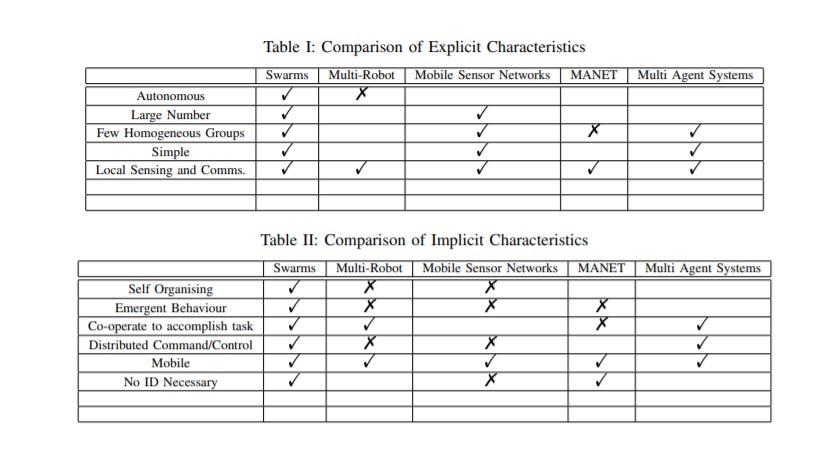
Peki SR’ı diğer sistemlerden farklı kılan şey nedir? SR’ı yakından ilişkili olduğu teknolojilerle bu konuyu daha iyi anlayabiliriz; bu konu ile ilişkili teknolojileri dört başlıkta inceleceyeceğim.
Çoklu Robot Sistemleri
Çoklu robot sistemleri de sürü robotik sistemleri gibi beraber, ortak bir amaç çerçevesinde çalışır; ancak çoklu robot sistemlerinin hesaplamaya ayırdığı sınırlı kaynakları vardır ve sadece okumak için robotun sensörlerinden veriyi alır ve bunu merkezi birime gönderir. Uzak işlemci (The remote processor ) denetleyici kontrol algoritmasına dayalı uygun kararları verir ve robota komutlar gönderir. Kısaca, çoklu robot sistemleri uzak mesafeden iyi tanımlanmış bir komuta ve kontrol yapısı tarafından yönetilirler. [8]
SR, aslında çoklu robot sistemlerinin geliştirilmiş bir halidir. SR, çoklu robot sistemlerinde bulunan bazı sınırlamaların (yerel algılama , merkezi kontrol eksikliği vb.) üstesinden gelerek özerk ve koordineli bir şekilde çalışmaya izin verir. Genelleyecek olursak, SR sistemini geleneksel çoklu robot sisteminden ayıran durum komuta ve kontrol yapılarıdır.
Komuta ve kontrol yapıları merkezi ve hiyerarşik değildir. Tamamen dağıtılmış bir biçimde, kendi kendini organize eden ve bunu gerçekleştirirken doğadadaki farklı hayvan topluluklarının ve böcek kolonilerinin kolektif davranışından esinlenmiştir. [9]
Mobil Sensör Ağları
Cihazları ve düğümleri içeren sensör ağlarıdır. Genellikle sensörler yardımıyla kablosuz bir ağ üzerinden iletişim kurarlar. Mobil sensör ağları, kendilerini hareket ettirebilecekleri düğümlere ya da hareket eden nesnelere yetileştirilen bir sensör ağıdır. Son zamanlarda robotik sensör ağları olarak bilinir. [10]
Mobil kablosuz sensör ağları (MWSN), kablosuz algılayıcı ağlar dalında birçok yönden uygulama alanına sahiptir. MWSN’ler son derece esnek ve düşük enerjili bir dizi kendi kendini organize edebilen kablosuz sensör düğümlerinin rastgele bir biçimde gözetim alanına dağılmasıdır. [11]
MWSN’ler temel olarak nesnelerin araştırılması ve kontrolü için nesneleri izler ve veri toplar. [12] Son yıllarda sürekli gelişimi devam eden SR’da ise sürü zekası algoritmalarının optimizasyonunda yer almaktadır. Örneğin yaygın olarak kapsama alanı optimizasyonunda, konum ve strateji algoritmasında, ağın dinamik dağıtımında, veri birleştirmede ve güvenilirliği gibi birçok yönde mobil sensör ağları kullanılır .
MWSN sürü zekası optimizasyon algoritmalarında aşağıdaki sebeplerden önemlidir.
- MWSN’ler genellikle dinamik, zamanla hızlı değişen çevre koşullarını gözlemler. İletişim için sensör düğümlerinin dış çevrenin bozulması ve değişmesi gibi bir durum ile karşı karşıya kalmasında kablosuz sensör ağlarının uyum sağlayıp verimli bir şekilde çalışması beklenir.
- Sensör düğümleri sayesinde ulaşılamaz ve tehlikeli yerler hakkında (sualtı izleme , nükleer endüstride çevresel gözlem gibi) bilgi toplama ve keşif yapmada yardımcı olur. Olası beklenmeyen bir senaryo ile karşı karşıya kalındığında sensör sistemi tasarımcıları sürü zekası optimizasyon algoritmaları elde edilen yeni bilgiler sayesinde karşı kalınan koşulda kendini ayarlayabilir.

Mobil Ad-hoc Ağı (MANET)
Mobil Ad-hoc ağlar (MANET’ler), düğümleri kendi kendine organize olan ve kendi aralarında iletişim için çok sekmeli (multihop : bir hedefe ulaşmak için bir düğüm diğer düğümleri röle olarak kullanılabilir [13].) bağımsız ve kablosuz bağlantılar kuran mobil ağlarından oluşur.
MANET’ler dinamik olarak geçici bir ağ oluşturan bir formdadır. Var olan bir ağ altyapısı veya merkezi bir idare kullanmazlar. Bunlar genellikle altyapısız ağ olarak isimlendirilir.[14]
MANET’ler iletişimin hayati özellik taşıdığı savaş bölgeleri ya da afet yardım bölgelerinde oldukça kullanışlıdır. Ancak MANET’lerin güvenlikle ilgili dezavantajları bulunmaktadır. Bunlar: altyapı eksikliği, güvenilir üçüncü tarafların olmaması ve olası kaynak kısıtlamaları ile karşı karşıya kalınması.
MANET, otonom kontrol ihtiyacının gerekli olduğu bir ağ türüdür. Tam olarak sürü robotlarının ortaya çıkan davranışlarını sergilemeseler de bazı güvenlik teknikleri sürü robotiğinde gerekli olan iletişim yöntemi ile ilgilidir.
Yazılım Etmeni (Software agent) (Autonomous Agent or Intelligent Agent)
Belirli bir ortamda (dinamik bir çevrede [normların değişmekte olduğu bir ortam] ) bir amaç çerçevesinde bir kullanıcı veya başka bir program için bir aracı olarak işlev görerek, sürekli ve otonom olarak çalışma yeteneğine sahip olan bir bilgisayar sistemidir. Esneklik hatta yaratıcılık sergileyerek sürekli doğrudan bir denetim ve kontrol olmaksızın hedefleri eyleme dönüştürmeyi amaçlar. Birden fazla etmenden oluşan otonom sistem ise çok aracılı sistem (multi- agent system[MAS]) olarak adlandırılır.
Yürütme sırasında bir ana bilgisayardan diğerine geçme yeteneği (göç) ile yürütmeye devam edebilen yazılım ve veri bileşimine mobil etmen (mobile agent) sınıfı denir. Mobil Aracı, bağlı düğümler ağı içinde kendi güzergahında seyahat eden hareket halindeki kod/nesnedir. [15] Mobil – çok etmenli sistemler, sürü sistemleri ile birçok özelliği paylaşır.
Mobil etmen sistemi sürü robotiğinde uygulama kolaylığı ve süreci verimli yürütmeyi sağlar. Robotlar için belirlenen rol, mobil etmene tanımlanır ve her etmen uygun pozisyona en yakın olan robota geçer . Bu sebeple sistem verimliliğini arttırma ve enerji tüketimini bastırmada önemli rol oynar. [16]
http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.157.1968&rep=rep1&type=pdf#page=183
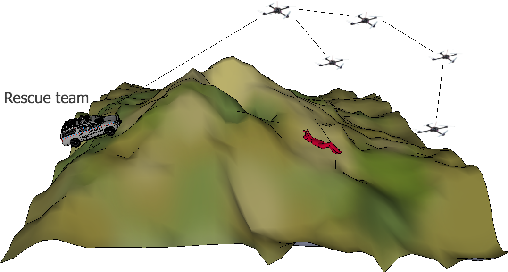
Sürü Teknolojisi Kullanım Alanları
Teknolojinin hızla gelişmesiyle SR’ı, askeri alanda , tarımda, arama kurtarma çalışmaları gibi hayatımızın birçok noktasında görmeye başladık. Tabi saydığım bu alanların zaman ilerledikçe daha da artacağından şüphem yok. Özellikle ucuz tasarım ile birçok işin üstesinden gelebileceği bir görevde ya da erişimin zor olduğu büyük maliyet ve zaman kaybına neden olabilecek ve insanlar için tehlikeli olabilecek görevlerde yer alabilir. [17]

Referanslar ve ileri okumalar
[1] https://www.researchgate.net/publication/308953674_Ant_Colony_Optimization
[2][3] [4] https://dergipark.org.tr/tr/download/article-file/1362572
[5] https://ieeexplore.ieee.org/abstract/document/5393617
[7] https://www.sciencedirect.com/science/article/pii/S221491471300024X
[8] [9] [10] http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.157.1968&rep=rep1&type=pdf#page=183
[11][12] https://ieeexplore.ieee.org/document/8890812
[13] https://en.wikipedia.org/wiki/Multi-hop_routing
[14] http://www.mecs-press.org.ua/ijisa/ijisa-v5-n1/IJISA-V5-N1-8.pdf
[15] https://en.wikipedia.org/wiki/Mobile_agent
[17] https://core.ac.uk/download/pdf/59347273.pdf
[İLGİLİSİNE : Frameworklerine ulaşmak için : http://www.techferry.com/articles/swarm-intelligence.html#aspects ]








Yorum gönder